Introduction
The purpose of this is to relate an objects surface shape after deflection under load to the stress being applied. Most of what I have written here is my attempt to understand and compute the surface curvature of a dataset for surface profile analysis. I have not taken a differential geometry class so everything here is learned in my own time by reading books, theses, and online material.
The example I used is as follows. I have a flat square sheet that has a smaller sensitive device bonded to the top it. The attached device cannot undergo a certain amount of stress or deformation due to bending or else it will fail. In this case, we are assuming perfect adhesion (or effectively ignoring the type of adhesion) but instead comparing the results with a known-good device of similar adhesion and size. If the amount of bending of the experimental device is less than the control, then we can assume it will pass. I have completed a structural model of a flat square sheet that is loaded in a complex configuration where it is experiencing forces from both the top and bottom in an irregular pattern causing the sheet to bow, fold, potato chip, and warp in a way that is difficult to calculate by hand. The device is not included in the model since we can assume the forces it exerts back onto the sheet are negligible. The model has used a tetrahedron mesh so the surface is defined as a evenly spaced triangular mesh that is not symmetric or patterned and is somewhat random. I have exported the X, Y, and Z values of the surface nodes into a CSV file for further analysis.
I am using Python as the language of choice since it has readily available libraries for doing complex math functions and is relatively simple and popular. With that, it is by no means an optimal, fast, or portable language, but I wanted to learn and hopefully share the concept so I think it fits quite well. Having learned the concept and technique, it is quite easy to later translate the code to a faster or compiled language like C, Zig, or Rust. This method of doing something once quickly and getting it working, and then doing it again another way will undoubtedly allow the programmer to come up with better techniques of implementation.
Most of the Python code I wrote can be found in the library I created at https://github.com/phcreery/surface_curvature
Data Massaging
There are many methods for smoothing out data. I could manually manipulate it to iron out inconsistencies, do some up-sampling, or re-mesh for better results. The method I am going with is fitting a 2D polynomial over my dataset. This is possible since I know my data can be represented as a monge patch
Polynomial Fit
If we have a dataset that is an n x m matrix where the values of the matrix are the Z height of the surface and the X and Y location of those points are evenly spaced. Still, the Z values are course approximations or measurements with error, we can perform a linear least squares fitting of this two-dimensional data that not only smooths out the data but gives us a polynomial that represents the data which can be used in parametric evaluation.
The polynomial regression model: etc.
can be expressed in matrix form in terms of a design matrix , a response vector , a parameter vector , and a vector of random errors. The -th row of and will contain the and values for the -th data sample. Then the model can be written as a system of linear equations:
which when using pure matrix notation is written as
See Linear least squares fitting of a two-dimensional data by christian to see a python implementation
Definitions
The differential of a parameterized surface tells us how tangent vectors on the domain get mapped to vectors in space. We can say that “pushes forward” vectors into , yielding vectors
Differential
Lets say we have a parameterized surface that is defined as (with , )
the differential is simply the exterior derivative
If we evaluate at a point in
Now lets say we want to evaluate a vector field of in (also known as a push-forward)
and then evaluated at a point
Gauss map
A Gauss map on surface is a continuous function that assigns to each point a unit normal vector . [1]
Shape Operator
The most common definition is as follows.
If , then for each tangent vector to at , define the shape operator: [2]
Where is a normal vector field to surface defined in a neighborhood of point , and is the covariant derivative. This describes the shape of the surface in the sense that we are measuring how the unit normal changes in the direction, which describes how the tangent planes are varying in the direction, hence describing the curving of the surface in locally. In summary, the directional derivative on in the tangent direction is equal to the Shape Operator at point applied to the same tangent vector
Example
Lets say we have a cylinder of radius defined as [3]
then proceeding with derivation
Then, the shape operator in and directions, rewritten in basis
Thus
I find this somewhat difficult to peal apart just what this means, but Keenan Crane breaks it down and expresses it in a slightly simpler manner.
We can find the principal curvature in terms of the shape operator, which is the unique map (some linear map from tangent vectors to tangent vectors) satisfying[4]
for all tangent vectors . The shape operator and the Weingarten map essentially represent the same idea: they both tell us how the normal changes as we travel along a direction . The only difference is that specifies this change in terms of a tangent vector on , whereas gives us the change as a tangent vector in .
By a direct calculation with the matrix defining the shape operator, it can be checked that the Gaussian curvature is the determinant of the shape operator, the mean curvature is half of the trace of the shape operator, and the principal curvatures are the eigenvalues of the shape operator with their directions being the corresponding eigenvectors; moreover, the Gaussian curvature is the product of the principal curvatures and the mean curvature is their sum.
Jumping forward again to Keenan Crane’s definition with a unit tangent at some point on a surface; one neat think about the principal directions and principal curvatures is that they correspond to eigenvectors and eigenvalues (respectively) of the shape operator.
Example
Let’s see this using an example provided by Keenan[5]. Let’s say we have a parameterized surface defined as:
we then need to find the derivative and the Gauss Map
from the Shape operator definition above, the function composition of
solving for the shape operator we get
the eigenvalues (, ) and eigenvectors (, ) are
if we push forward the eigenvectors from to , we can find the principal directions
Now we can evaluate the principal curvatures and magnitudes for any point on the surface
We can double check our work by checking that the principal directions are orthogonal
Mean Curvature
The mean curvature at a point on a surface, p∈U, is then the average of the signed curvature over all angles θ:
By applying Euler’s theorem, this is equal to the average of the principal curvatures:
For the special case of a surface defined as a function of two coordinates, e.g. and using the upward pointing normal the mean curvature expression is
Gaussian Curvature
Gaussian curvature is defined as
Similarly, for a surface described as graph of a function , Gaussian curvature is:
Principal Curvature
Principal curvature, κ, is often defined as
With representing the maximum and being the minimum principal curvatures.
I think this is somewhat counter-intuitive though since the definition of and is a function of and , but we just defined and as a function of and so we have a chicken or the egg situation. I prefer to find the principal curvatures first, then find the mean and gaussian curvature from them. The reason for this is the principal curvatures are not only signed scalar values, but they are vectors that point in a direction. The two equations above only give us their values but knowing both values and direction proves much more information. This is why I prefer finding the principal curvatures from the eigenvalues of the shape operator first.
Radius of Curvature
Knowing , the equation for the radius of curvature is
Curvedness
It makes sense to define an always positive number , henceforth referred to as the ‘curvedness’, to specify the amount, or ‘intensity’ of the surface curvature. Although several alternative definitions would serve, I chose:
This is similar to the RMS equation, essentially quantifying the positive valued mean curvature.
Representations
Surfaces can be defined as either a Local Parametrization, Monge Patch, or Implicit Function. I don’t find the Implicit function very useful in my case so I have skipped all references of it.
I have already given a preview of the gaussian and mean curvature defined for a monge patch. I am not going to try to derive the definitions of the first and second fundamental forms nor the shape operator, instead, I have just listed the definitions below.
Parameterized
Let be of and be a regular surface in . Given a local parametrization f : V → U , (also shown as where the functions , , have continuous partial derivatives) and a unit normal vector field to , one defines the following objects as real-valued or matrix-valued functions on .
| Name | Notation | Definition |
|---|---|---|
| A unit normal vector field | ||
| First fundamental form | ||
| “” | ||
| “” | ||
| Second fundamental form | ||
| “” | ||
| “” | ||
| Shape operator | ||
| Gaussian curvature | ||
| Mean curvature | ||
| Principal curvatures |
Monge Patch
The following summarizes the calculation of the above quantities relative to a Monge patch or height map (also sometimes expressed as ). Here and denote the two partial derivatives of , with analogous notation for the second partial derivatives. The second fundamental form and all subsequent quantities are calculated relative to the given choice of unit normal vector field.
| Name | Formula |
|---|---|
| A unit normal vector field | |
| First fundamental form | |
| Second fundamental form | |
| Shape operator | |
| Gaussian curvature | |
| Mean curvature |
Experiment
As a reminder to the reader, we are seeing if we can use surface shape after deflection under load as a proxy to strain, or even stress.
Setup
Lets say we have a complex loaded sheet that is being compressed from behind and a fragile part attached to it. Under these loading conditions, we know the device does not fail. This will be our control. Now, we want to know if a larger device fixed to it will be able to perform without failing due to stress.
I will be using COMSOL to simulate deformation of the surface which we will use os the dataset for the theory. I will also simulate the stress of the part which will serve as the results to compare the theory to.
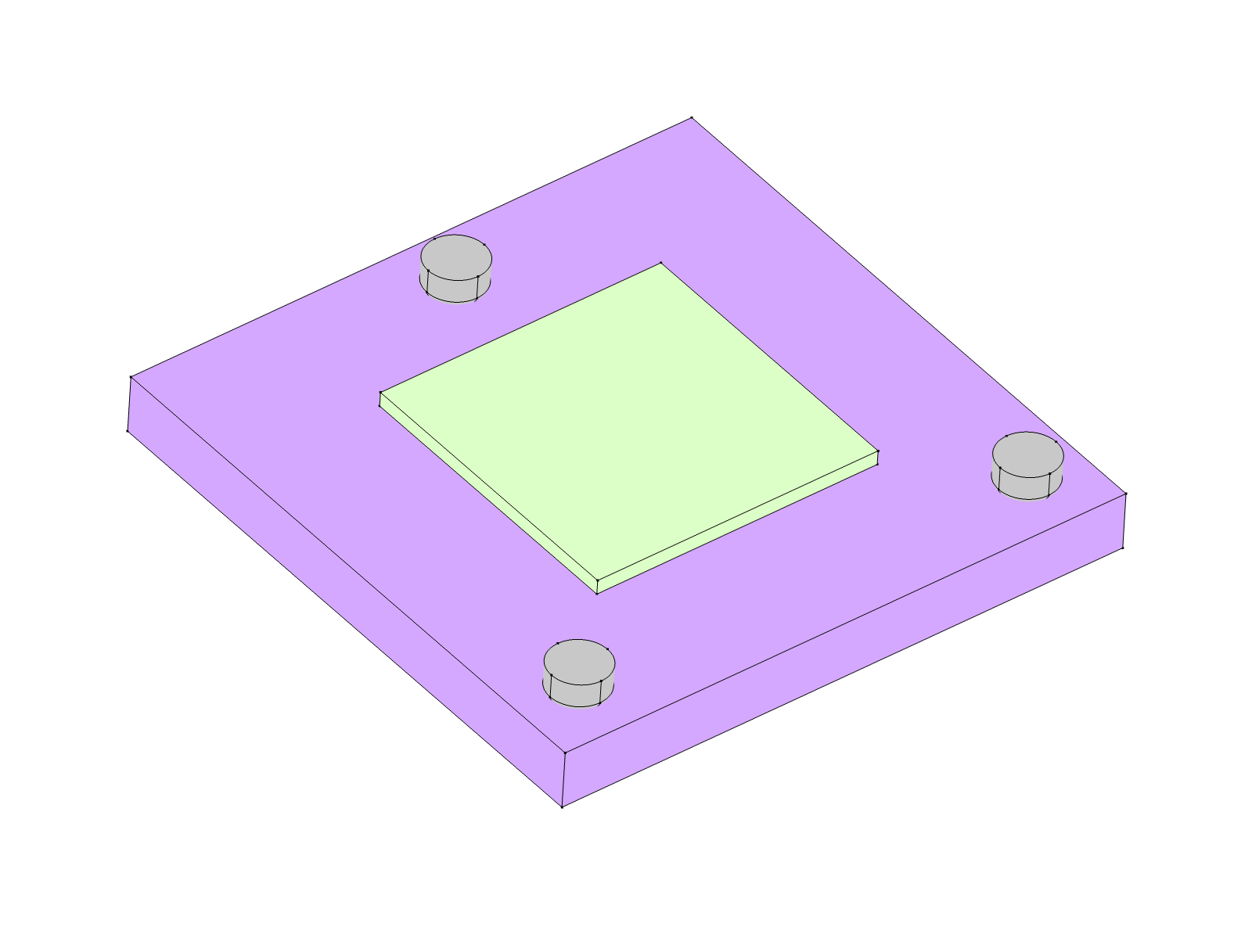
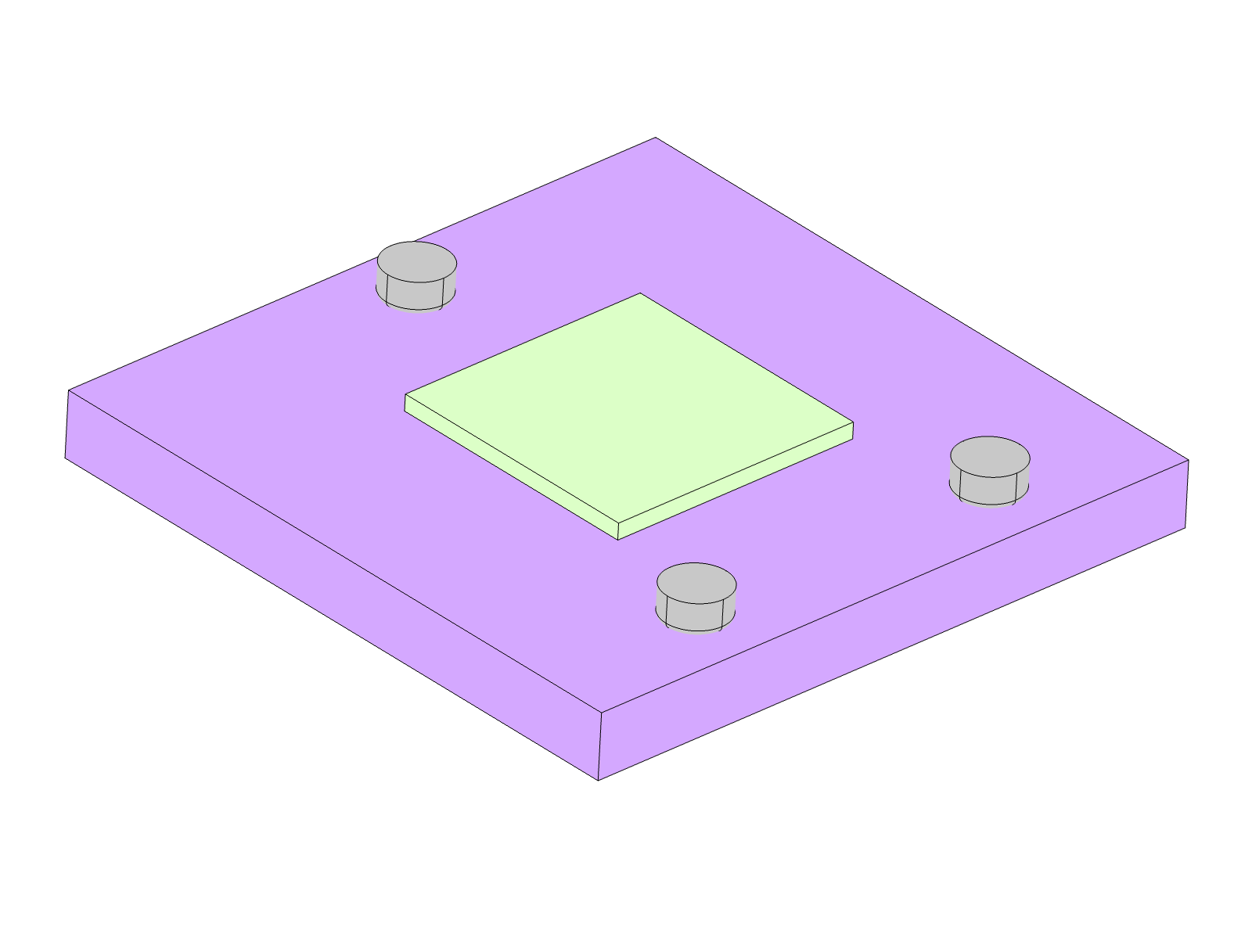 Setup 1. Module (Green), Carrier (Purple), Support (Grey)
Setup 1. Module (Green), Carrier (Purple), Support (Grey)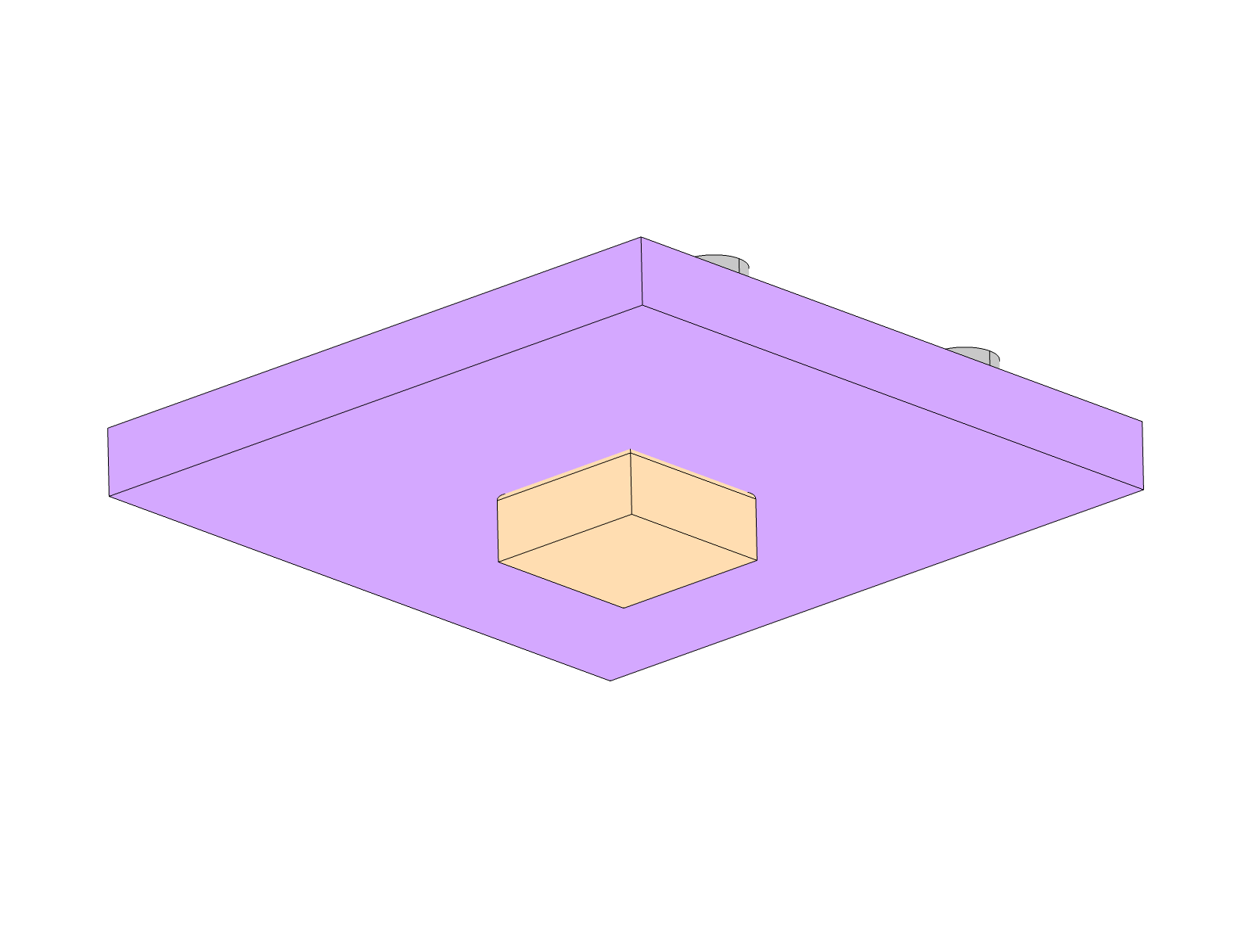 Setup 1 back-side. Load (Orange)
Setup 1 back-side. Load (Orange)
The initial setup has an 8x8x0.5 Silicon Module adhered to the center of the top-side of the carrier.
 Setup 1 in COMSOL
Setup 1 in COMSOL
For the next setup, 2, I simply doubled the load to 40 For setup 3, I increased the carrier thickness from 2 to 3 .
 Setup 3 in COMSOL
Setup 3 in COMSOL
For setup 4, I went back to 2 thick carrier and I used 4 support members in the corners separated 16mm apart.
 Setup 4 in COMSOL
Setup 4 in COMSOL
For setup 5, I increased the module size from 8x8 to 10x10 . For setup 6, I went back to the triangular loading, keeping the 40 load and 10x10 module. For setup 7, I kept the larger module and bumped the load back down to 20
 Setup 7
Setup 7
Results
After the models were setup in FEA, I exported the Max Stress and the Deformation of the mesh in the Module Attach region as X,Y,X pairs in a text file.
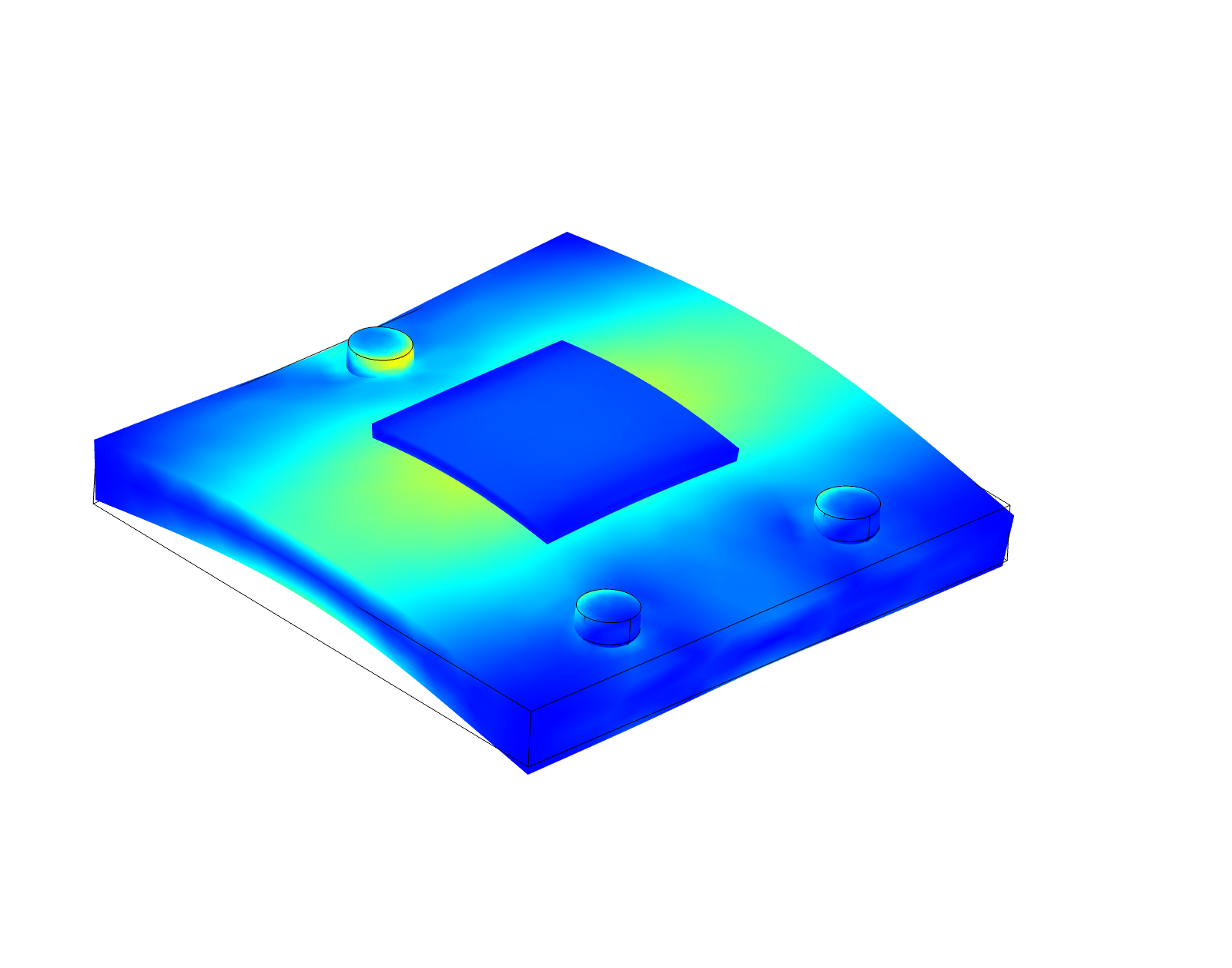
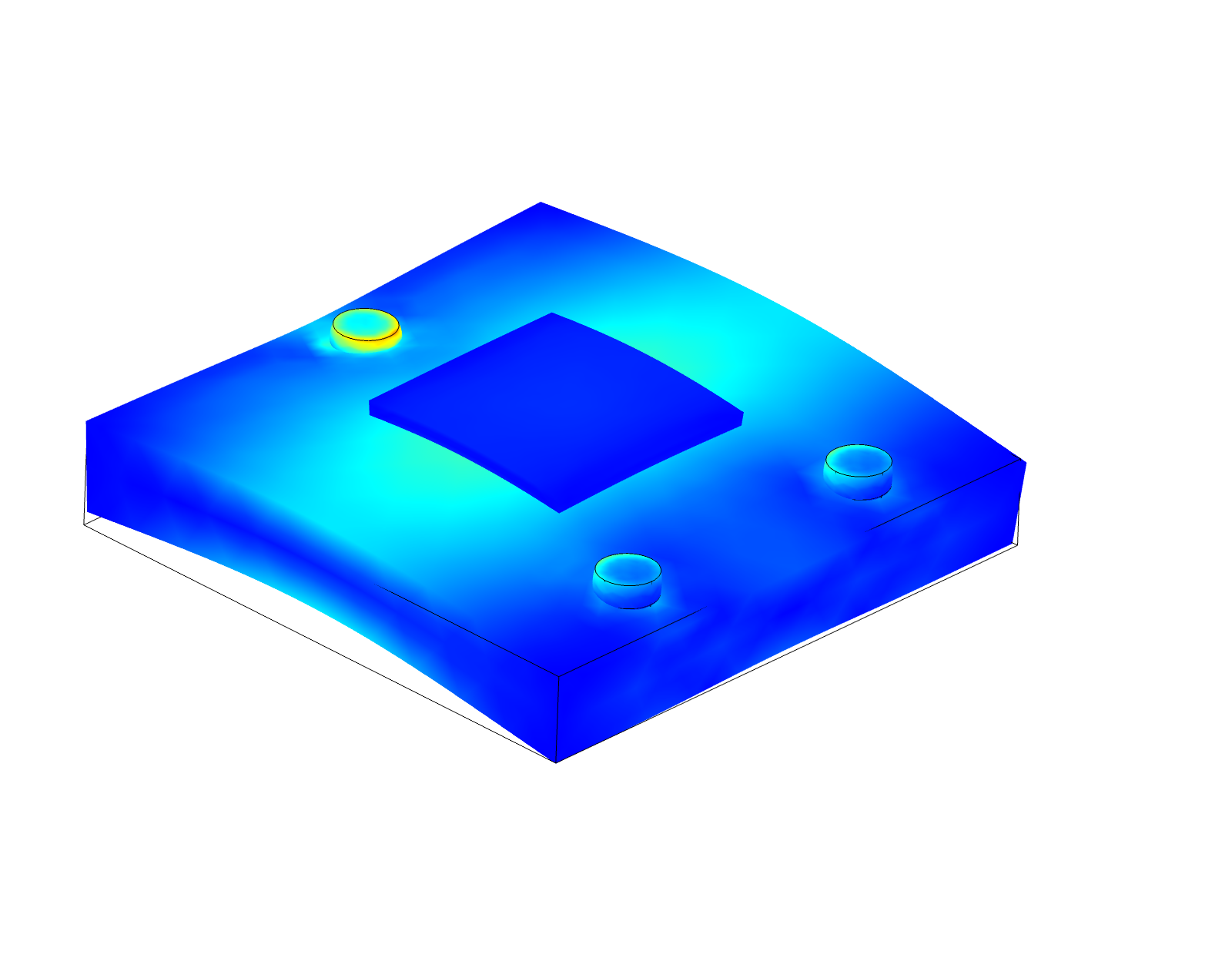
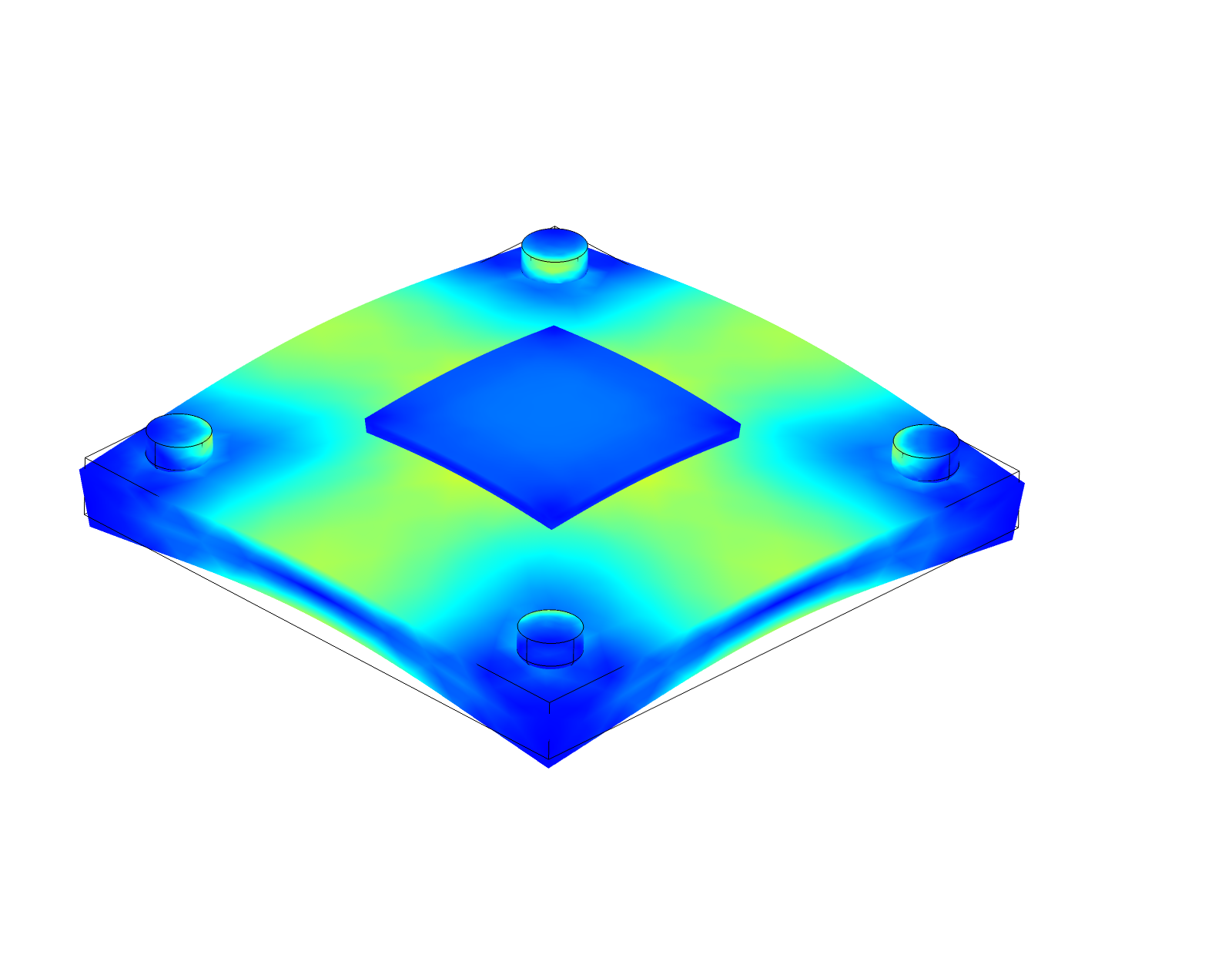
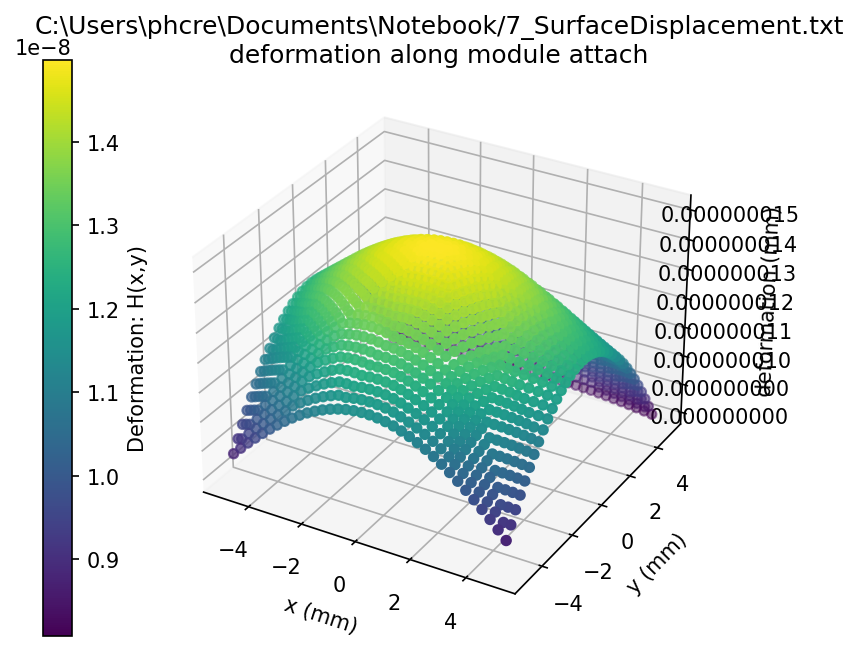 Setup 7 Deformation
Setup 7 Deformation
I then fed this into a python notebook to compute maximum curvedness.
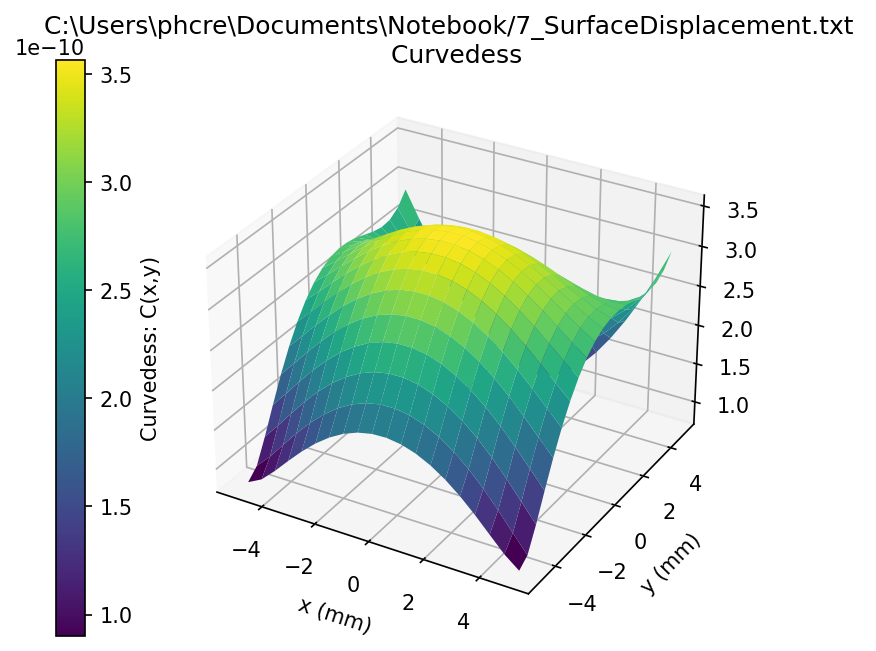 Setup 7 Curvedness
Setup 7 Curvedness
If we run the larger device under a parametric sweep of different load, thickness, and support structure, we should be able to plot the amount of curvature in relation to the stress in different loading setups.
| Setup | Load | Support Configuration | Device Size | Carrier Thickness | Max Stress of Module | Max Curvedness |
|---|---|---|---|---|---|---|
| N/m^2 | mm | mm | N/m^2 | 1/m | ||
| 1 | 20 | -5/5 Triangle | 8x8 | 2 | 23.47 | 3.62E-10 |
| 2 | 40 | -5/5 Triangle | 8x8 | 2 | 55.34 | 7.14E-10 |
| 3 | 40 | -5/5 Triangle | 8x8 | 3 | 18.69 | 2.52E-10 |
| 4 | 40 | -8/8 Corners | 8x8 | 2 | 55.08 | 7.96E-10 |
| 5 | 40 | -8/8 Corners | 10x10 | 2 | 61.9 | 7.52E-10 |
| 6 | 40 | -5/5 Triangle | 10x10 | 2 | 60.84 | 6.98E-10 |
| 7 | 20 | -5/5 Triangle | 10x10 | 2 | 30.36 | 3.58E-10 |
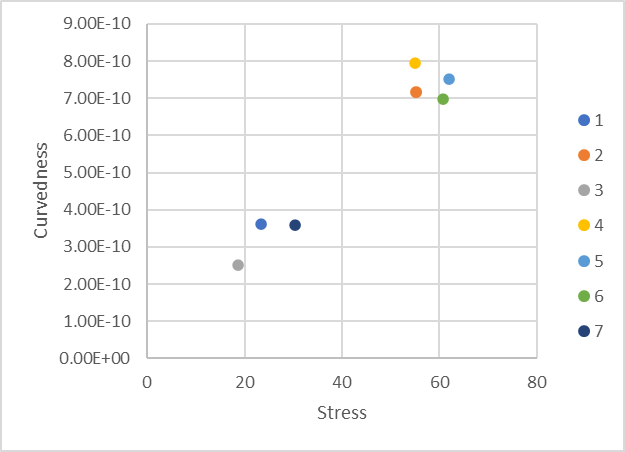 Max Stress vs Max Cuvedness
Max Stress vs Max Cuvedness
From this dataset, we can see there is a small correlation between the measured surface curvature of the device and the resulting stress in the module. In a sense, it it almost like a stress strain graph of complex geometry.
Potential Oversights
All of these experiments were done with several uniform parameters. Any one of these could change the results but I kept them constant for simplicity.
| Parameter | Value | Examples |
|---|---|---|
| Module Geometry | Rectangular cuboid of uniform thickness | Rectangular prism, etc. |
| Carrier Geometry | Rectangular cuboid of uniform thickness | Complex shape |
| Load Geometry | 5x5 mm square load placed in the center of the backside of the carrier | Different sized, placed in a different location, etc. |
| Support Configuration | 3 pads that the carrier presses up against. | |
| Materials | I used generic material for this study but kept them the same across the experiments. | If I change them, the results may vary |
I am also aware the COMSOL is able to calculate the surface curvature but not all FEA software will do this. Plus, most of this exercise was because I wanted to see if I could calculate it myself. I am interested in seeing if I could compare my curvature calculations to that of the COMSOL.
https://e.math.cornell.edu/people/belk/differentialgeometry/Outline - The Gauss Map.pdf ↩︎
https://jhavaldar.github.io/assets/2017-07-16-diffgeo-notes5.pdf ↩︎
https://web.archive.org/web/20250517150453/https://www.appstate.edu/~greenwaldsj/class/4140/shapeoperator.pdf ↩︎
http://wordpress.discretization.de/geometryprocessingandapplicationsws19/a-quick-and-dirty-introduction-to-the-curvature-of-surfaces/ ↩︎
https://brickisland.net/DDGFall2017/wp-content/uploads/2017/10/CMU_DDG_Fall2017_08_Surfaces.pdf ↩︎